Hybrid Exploration Robot for Air and Land Deployment





Project Overview
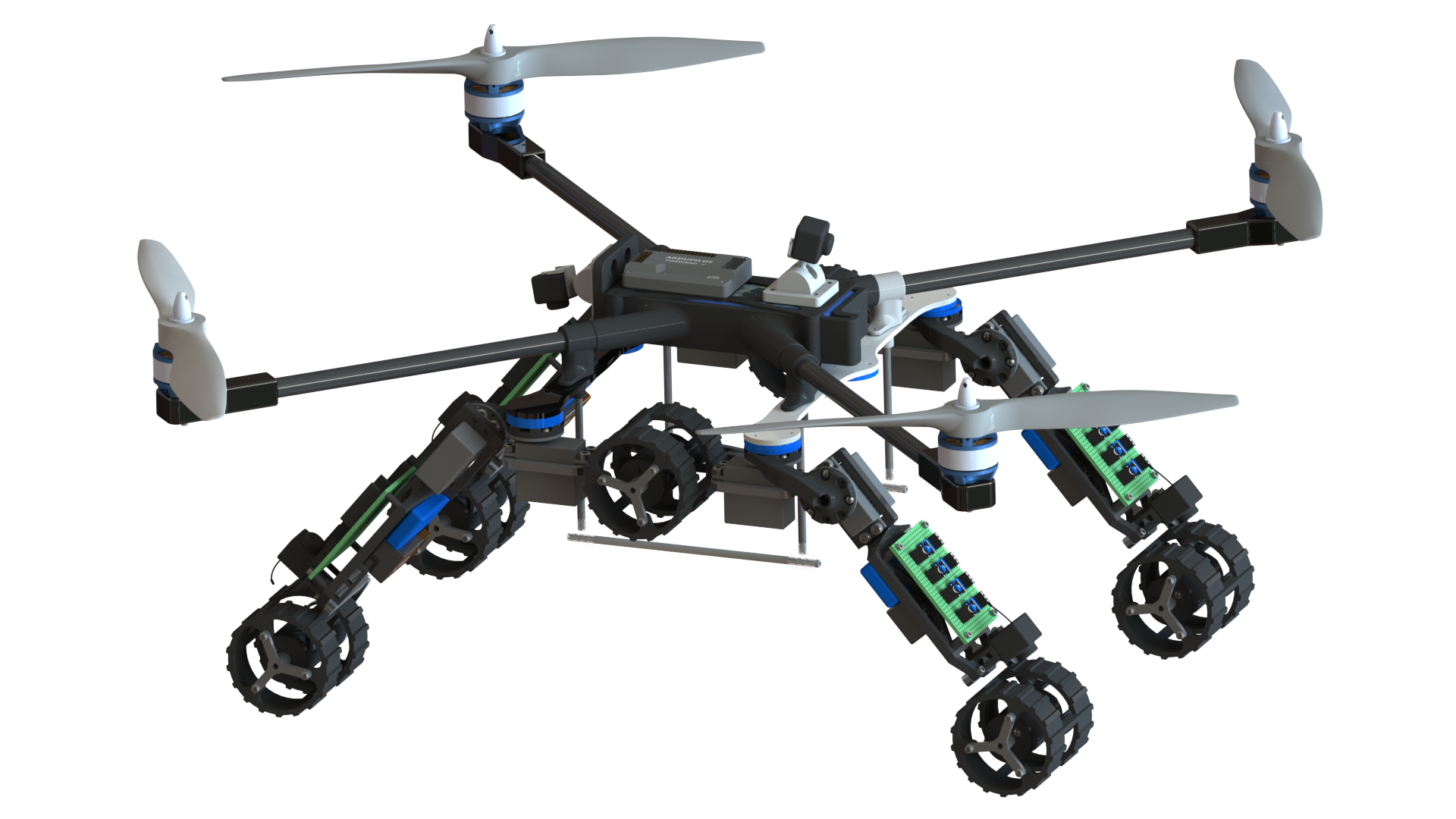
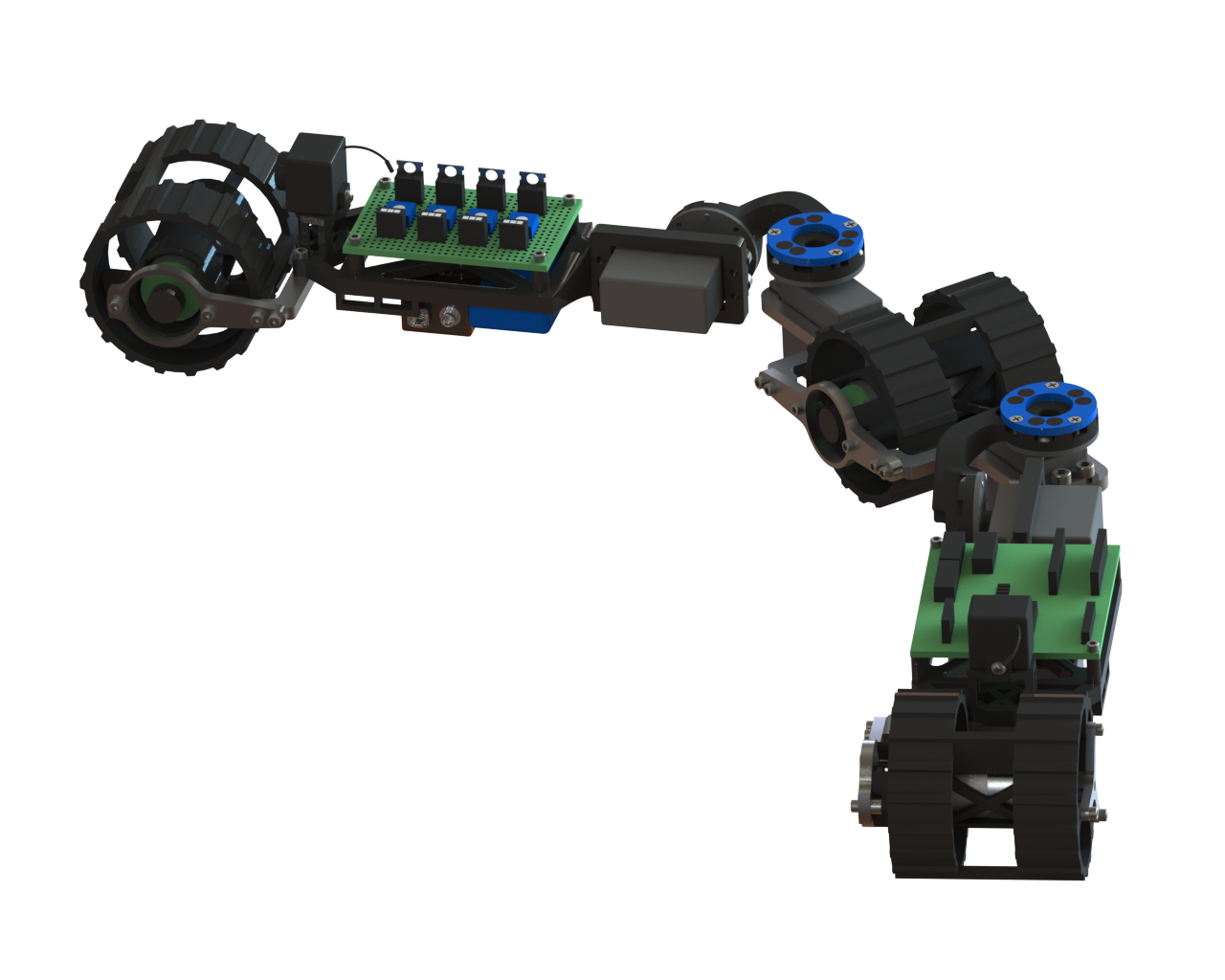
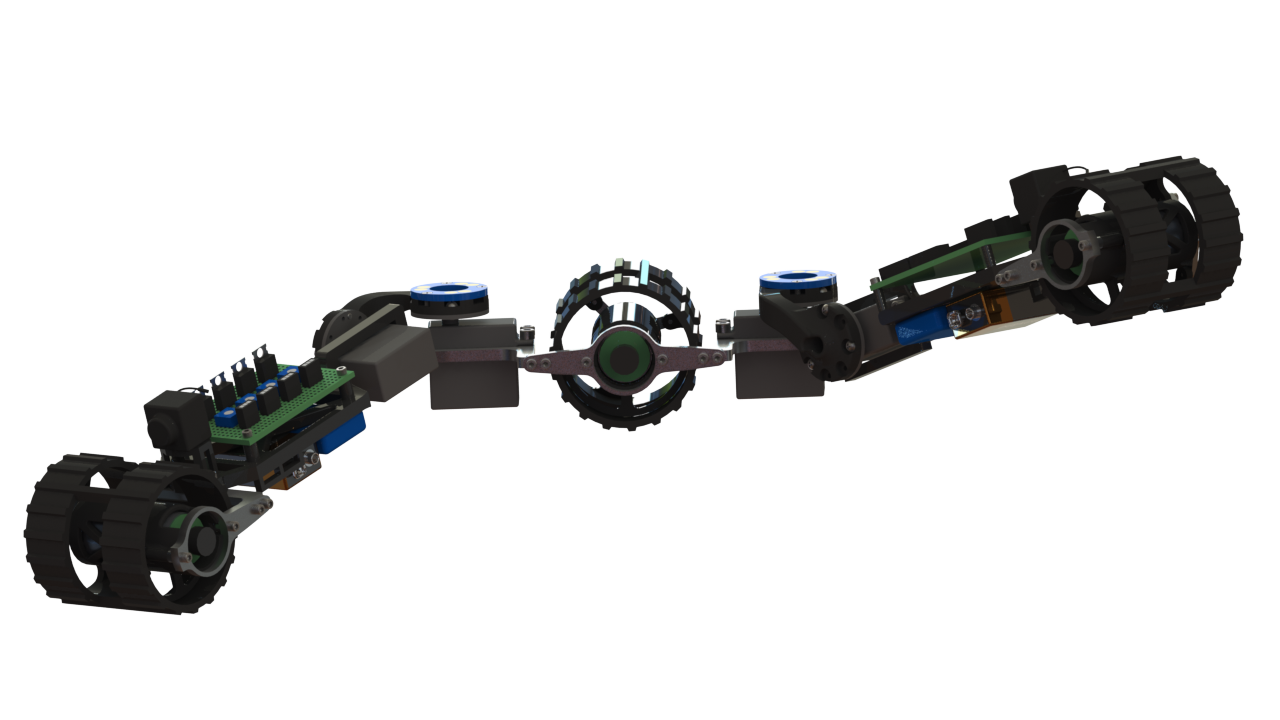
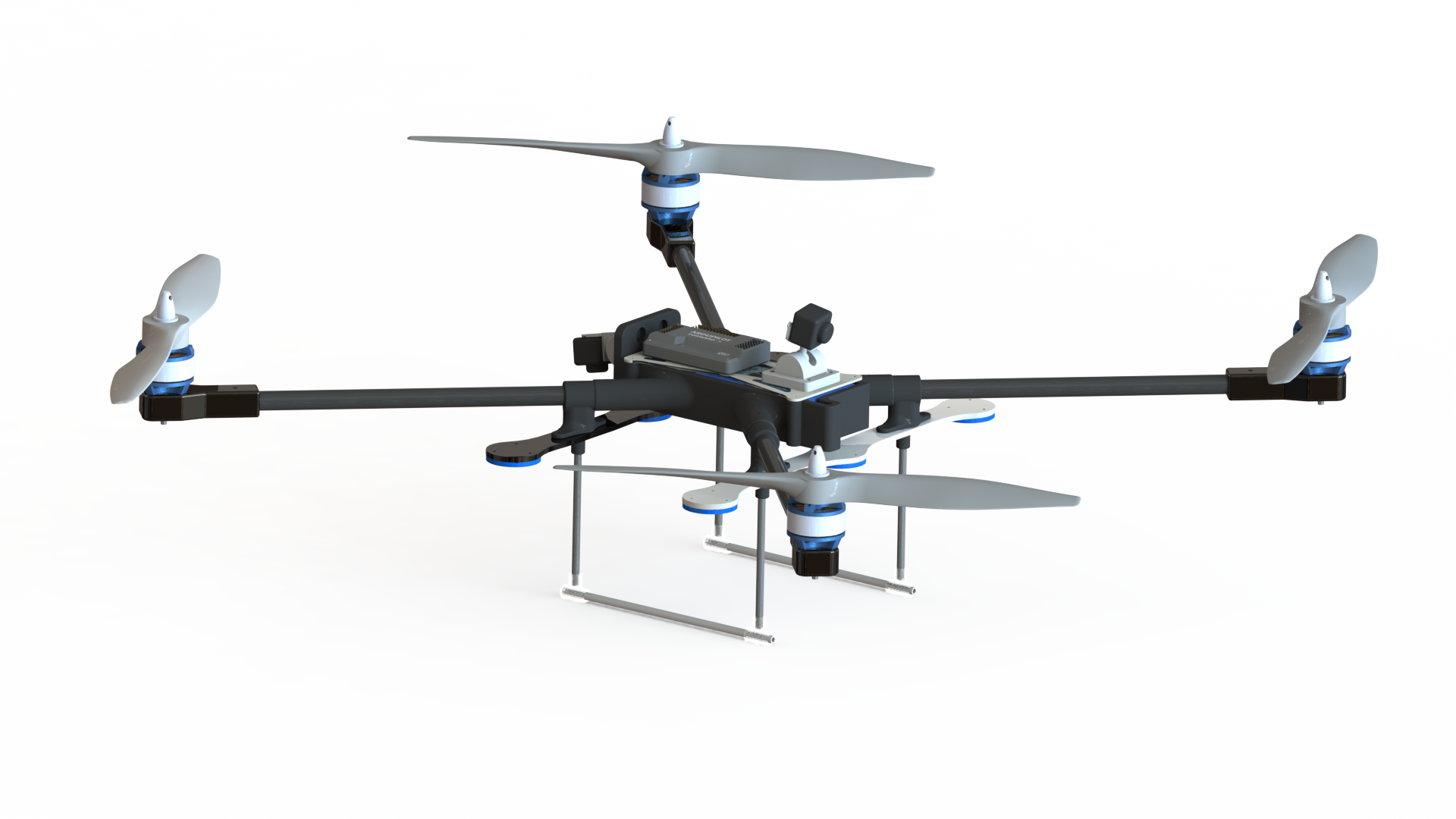
The H.E.R.A.L.D. system combines two different form factors: a quadrotor and a light-weight, nimble snake. The snake robot is designed to maneuver both over and through rubble, while the quadrotor provides aerial surveillance. The integration of these form factors, using two snake robots and one quadrotor, allows for increased maneuverability and operational lifetime.
Quadrotors have notoriously short battery life. The H.E.R.A.L.D. system allows for the quadrotor to be carried by two snakes while not in use, providing increased battery life without sacrificing mobility. In addition, snake robots alone are constrained to the ground. The H.E.R.A.L.D. quadrotor is capable of carrying a single snake, so that these robots may be transported to previously unreachable locations.
My Role
System Level Design
Designed communication architecture for the HERALD system
Electronics
Created custom PCB's for the snake robots, as well as voltage regulation boards to power the servos and motors on board the snake robot.
Embedded
Implemented a lightweight XBee communication protocol between snake robots and command computer. Wrote low level software for snake robots.
Key Skills
Eagle PCB, C, Matlab, Analog and Digital Circuit Design
Featured In