Trajectory Planning and Control of Kmel Nano Plus Quadrotor


Project Overview
This project's goal was to control a Kmel Nano Plus using closed loop trajectories. To accomplish this goal the project was divided into two parts. The first part consisted of simulating path planning and trajectories for the Nano Plus using Matlab, while the second part consisted of using the actual quadrotor to execute closed loop trajectories.
My Role
A* Algorithm
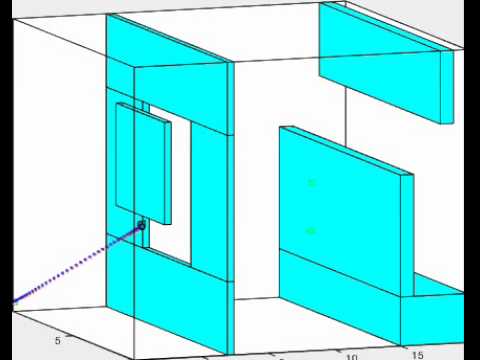
For this project I wrote an A* shortest path algorithm in Matlab, which given obstacle coordinates , a start point, and end point , breaks free space into grid cells and finds the shortest path between the start and goal. The first movie shows a Matlab simulation of the quadrotor navigating through an obstacle course using my A* algorithm.
Trajectory Generator
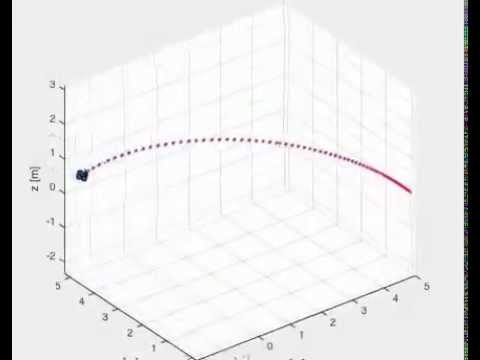
In addition to an A* algorithm, I also wrote a trajectory generator and position controller for the nano plus. The second video is a simulation of a simple helix trajectory for the nano plus. In a team with two other people I wrote part of the Matlab low level controller, and trajectory planning which we ran on an actual quadrotor. As seen in the last video.
Key Skills
Djikstra and A* Path Planning, Matlab, PID Control